Iklan
Pertanyaan
USBN 2017/113 Soal Tipe Penalaran Roda A berjari-jari 4 cm dihubungkan dengan roda B yang berjari-jari 10 cm seperti padagambar. Apabila roda A diputar sebanyak 5 putaran tiap detik, maka pernyataan berikut yang benar adalah .....
USBN 2017/113 Soal Tipe Penalaran
Roda A berjari-jari 4 cm dihubungkan dengan roda B yang berjari-jari 10 cm seperti pada gambar.
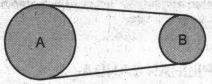
Apabila roda A diputar sebanyak 5 putaran tiap detik, maka pernyataan berikut yang benar adalah .....
Roda A akan berputar dengan kecepatan linier

Roda A akan berputar dengan kecepatan linier

Roda B akan berputar sebanyak 20 putaran tiap detik

Roda B akan berputar sebanyak 40 putaran tiap detik
Roda B akan berputar dengan kecepatan linier
Iklan
N. Puspita
Master Teacher
Pembahasan


Diketahui: Pembahasan: Pada hubungan roda-roda yang dihubungkan dengan tali, nilai kecepatan linear kedua benda sama besar, sehingga berlaku: Mencari kecepatan linear roda A ( ) dan rodaB ( ) Karena = , maka Mencari kecepatan sudut roda B( ) Maka, banyaknya putaran roda B adalah: Jadi, kecepatan linear roda A ( ) dan roda B ( ) adalah dan banyaknya putaran roda B adalah 2 putaran/sekon. Dari pembahasan di atas, dapat disimpulkan bahwa tidak ada pilihan jawaban yang tepat.
Diketahui:

Pembahasan:
Pada hubungan roda-roda yang dihubungkan dengan tali, nilai kecepatan linear kedua benda sama besar, sehingga berlaku:

Mencari kecepatan linear roda A ( ) dan roda B (
) dan roda B ( )
)

Karena = , maka 
Mencari kecepatan sudut roda B ( )
)

Maka, banyaknya putaran roda B adalah:

Jadi, kecepatan linear roda A () dan roda B () adalah  dan banyaknya putaran roda B adalah 2 putaran/sekon.
dan banyaknya putaran roda B adalah 2 putaran/sekon.
Dari pembahasan di atas, dapat disimpulkan bahwa tidak ada pilihan jawaban yang tepat.


Perdalam pemahamanmu bersama Master Teacher
di sesi Live Teaching, GRATIS!
22
4.6 (13 rating)
Nariswari
Pembahasan lengkap banget
anothersideofzyyy
Pembahasan lengkap banget
Iklan

Pertanyaan serupa
RUANGGURU HQ
Jl. Dr. Saharjo No.161, Manggarai Selatan, Tebet, Kota Jakarta Selatan, Daerah Khusus Ibukota Jakarta 12860
Coba GRATIS Aplikasi Roboguru

Coba GRATIS Aplikasi Ruangguru


Produk Ruangguru
Bantuan & Panduan
Hubungi Kami

Ikuti Kami





©2026 Ruangguru. All Rights Reserved PT. Ruang Raya Indonesia